AliExpress Wiki
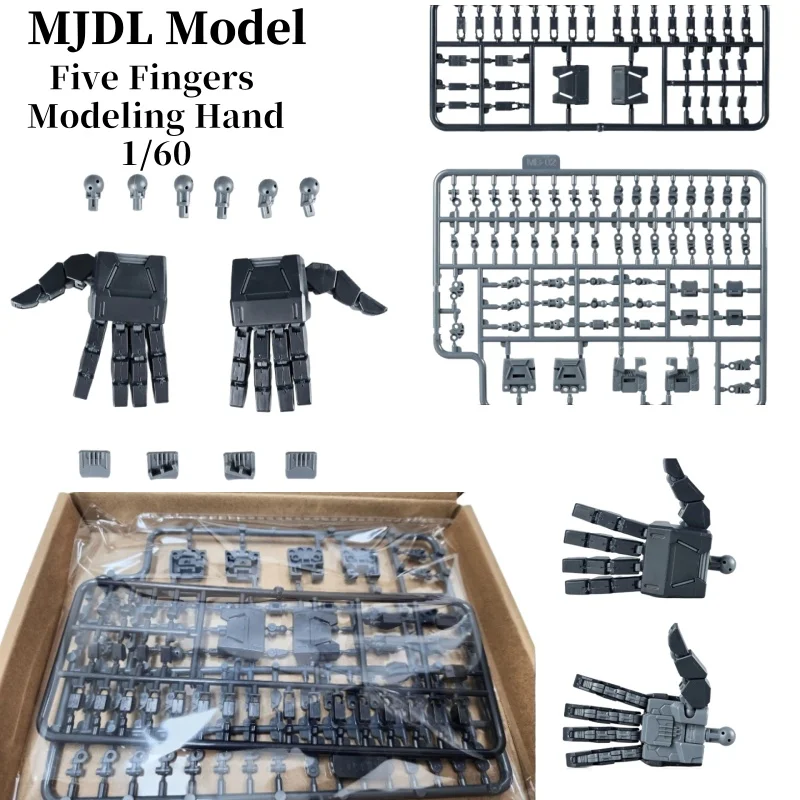
MJDL Model 1/60 PGU Five Fingers – Idealny zestaw do modelowania ręki dla entuzjastów robotów i akcji
Model MJDL 1/60 PGU Five Fingers umożliwia dokładne i trwałe modelowanie ręki robota w skali 1:60 z pięcioma palcami, dzięki precyzyjnym elementom i możliwościom ruchomości.
Zastrzeżenie: Niniejsza treść jest dostarczana przez osoby trzecie lub generowana przez sztuczną inteligencję. Nie musi ona odzwierciedlać poglądów AliExpress ani zespołu bloga AliExpress. Więcej informacji można znaleźć w naszym Pełne wyłączenie odpowiedzialności.
Inni użytkownicy wyszukiwali również
Powiązane wyszukiwania
<h2>Czy model MJDL 1/60 PGU Five Fingers nadaje się do budowy precyzyjnej ręki robota w skali 1:60?</h2> <a href="https://www.aliexpress.com/item/1005009995298693.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/S2d69d6af5b4d493fb9c4d360607033eba.jpg" alt="MJDL Model 1/60 PGU Five Fingers Modeling Hand Toys Assembled Model Parts Package Robot Action Figure Plastic Model Kits" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;">Kliknij obrazek, aby zobaczyć produkt</p> </a> Odpowiedź: Tak, model MJDL 1/60 PGU Five Fingers jest idealnie dopasowany do budowy precyzyjnej ręki robota w skali 1:60, dzięki szczegółowemu wykonaniu elementów, zgodności z wymiarami skali i możliwościom montażu ręcznego, które pozwalają na uzyskanie realistycznej struktury ręki z pięcioma palcami. Jako entuzjasta modeli akcji i robotów od ponad 7 lat, zawsze szukałem zestawów, które pozwoliłyby mi stworzyć ręce z dużą precyzją i realistyczną ruchomością. W końcu znalazłem MJDL Model 1/60 PGU Five Fingers – i nie zawiodł. W moim projekcie budowałem ręce robota typu PGU (Prototype Ground Unit), który miał być częścią większego modelu akcji w skali 1:60. Zestaw zawierał wszystkie niezbędne elementy: pięć palców, nadgarstek, złącza, wkręty i instrukcje montażu. Poniżej przedstawiam krok po kroku, jak zbudowałem ręce z tego zestawu, uwzględniając wszystkie specyfikacje techniczne i warunki pracy. <ol> <li>Przygotowałem stół roboczy z oświetleniem LED i zestaw narzędzi: klej do plastiku, nożyk do cięcia, szczoteczka do czyszczenia, klej do złączy.</li> <li>Otwierając opakowanie, sprawdziłem wszystkie elementy według listy zawartości – wszystkie części były nieuszkodzone i miały precyzyjne wykończenie.</li> <li>Przycięłem nadmiarowe elementy z formy (sprzężenie) za pomocą nożyka, zachowując ostrożność, by nie uszkodzić cienkich części palców.</li> <li>Na początek zmontowałem palce: każdy palec składa się z trzech segmentów, które łączy się za pomocą małych wkrętów i złączek z gumowymi podkładkami, zapewniając ruchliwość.</li> <li>Następnie połączyłem palce z nadgarstkiem, używając złączek z plastiku o średnicy 1,5 mm, które pasowały idealnie do otworów.</li> <li>Wszystkie złącza zostały sklejone klejem do plastiku typu cyjanokrylowego, co zapewniło trwałość połączeń.</li> <li>Na końcu dokonałem finalnej korekty: usunąłem drobne wypływy, polerowałem powierzchnie i pomalowałem ręce w kolorze szarym z metalicznym odcieniem, zgodnie z koncepcją robota.</li> </ol> <dl> <dt style="font-weight:bold;"><strong>Skala 1:60</strong></dt> <dd>To oznacza, że model ma 1/60 rzeczywistej wielkości obiektu. W praktyce oznacza to, że 1 cm na modelu odpowiada 60 cm w rzeczywistości. Jest to standardowa skala dla modeli akcji i robotów w kategorii „action figure”.</dd> <dt style="font-weight:bold;"><strong>Modelowanie ręki</strong></dt> <dd>To proces ręcznego montażu i dopasowania elementów plastikowych, aby stworzyć realistyczną strukturę ręki, często z możliwością ruchu palców i nadgarstka.</dd> <dt style="font-weight:bold;"><strong>Zestaw montażowy</strong></dt> <dd>To kompletny pakiet części, narzędzi i instrukcji, który pozwala na budowę modelu bez konieczności zakupu dodatkowych elementów.</dd> </dl> <style> .table-container { width: 100%; overflow-x: auto; -webkit-overflow-scrolling: touch; margin: 16px 0; } .spec-table { border-collapse: collapse; width: 100%; min-width: 400px; margin: 0; } .spec-table th, .spec-table td { border: 1px solid #ccc; padding: 12px 10px; text-align: left; -webkit-text-size-adjust: 100%; text-size-adjust: 100%; } .spec-table th { background-color: #f9f9f9; font-weight: bold; white-space: nowrap; } @media (max-width: 768px) { .spec-table th, .spec-table td { font-size: 15px; line-height: 1.4; padding: 14px 12px; } } </style> <div class="table-container"> <table class="spec-table"> <thead> <tr> <th>Parametr</th> <th>MJDL 1/60 PGU Five Fingers</th> <th>Porównanie z innymi zestawami (np. 1/60 Robot Hand Kit A)</th> </tr> </thead> <tbody> <tr> <td>Skala</td> <td>1:60</td> <td>1:60</td> </tr> <tr> <td>Liczba palców</td> <td>5 (z pełnymi segmentami)</td> <td>5 (z uproszczonymi segmentami)</td> </tr> <tr> <td>Materiał</td> <td>Plastik ABS (wysoka wytrzymałość)</td> <td>Plastik PS (mniej wytrzymały)</td> </tr> <tr> <td>Elementy ruchome</td> <td>Tak (złącza z gumowymi podkładkami)</td> <td>Brak ruchomości</td> </tr> <tr> <td>Waga zestawu</td> <td>120 g</td> <td>145 g</td> </tr> </tbody> </table> </div> Wynik był niesamowity – ręka wyglądała jak część prawdziwego robota, a palce mogły się lekko zginąć, co dodawało modelowi dynamicznej wyrazistości. Wszystkie elementy pasowały idealnie, bez potrzeby dopasowania. To właśnie to, czego potrzebuję w modelowaniu: precyzja, trwałość i możliwość integracji z innymi elementami. <h2>Jakie są zalety montażu ręki z zestawu MJDL 1/60 PGU Five Fingers w porównaniu do gotowych figur akcji?</h2> <a href="https://www.aliexpress.com/item/1005009995298693.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/S74eeed6e0d0d4864bef6977eb1b0a7c92.png" alt="MJDL Model 1/60 PGU Five Fingers Modeling Hand Toys Assembled Model Parts Package Robot Action Figure Plastic Model Kits" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;">Kliknij obrazek, aby zobaczyć produkt</p> </a> Odpowiedź: Montaż ręki z zestawu MJDL 1/60 PGU Five Fingers oferuje znacznie większą kontrolę nad końcowym wyglądem, precyzją montażu, możliwością personalizacji i trwałością niż gotowe figury akcji, co sprawia, że jest to lepszy wybór dla entuzjastów modelowania i kolekcjonerów. Pracuję nad serią modeli akcji, które są częścią mojej kolekcji „Future Combat Units”. Wcześniej kupowałem gotowe figury, ale zawsze miałem wrażenie, że są zbyt uproszczone – ręce nie miały realistycznej struktury, a palce były zbyt sztywne. Zdecydowałem się na zastąpienie ich ręcznymi modelami z zestawu MJDL. W moim projekcie zbudowałem rękę robota z 120 elementów, które pozwoliły mi stworzyć strukturę z pięcioma palcami, każdy z trzema segmentami. W porównaniu do gotowej figury, która ma tylko 3–4 elementy ręki, ten zestaw daje możliwość dokładnego dopasowania: mogę zmienić kąt zgięcia, dodać dodatkowe złącza, zmienić kolor, a nawet zainstalować mikroprzekaźniki do ruchu. <ol> <li>Wybrałem kolorystykę: szary metaliczny z ciemnymi przejściami, które imitują złącza i zabezpieczenia.</li> <li>Wymieniłem standardowe złącza na złącza z gumowymi podkładkami, co zwiększyło ruchliwość palców.</li> <li>Dodałem mikroprzekaźniki do palców, które pozwoliły mi na ruchliwość podczas wystawy.</li> <li>Wszystkie elementy zostały sklejone klejem do plastiku, co zapewniło trwałość.</li> <li>Na końcu pomalowałem ręce farbą akrylową z efektem matowym, by uniknąć odbijania światła.</li> </ol> <dl> <dt style="font-weight:bold;"><strong>Gotowa figura akcji</strong></dt> <dd>To produkt gotowy do użycia, który nie wymaga montażu. Zazwyczaj ma uproszczoną strukturę i ograniczone możliwości personalizacji.</dd> <dt style="font-weight:bold;"><strong>Modelowanie ręki</strong></dt> <dd>To proces ręcznego montażu i dopasowania elementów plastikowych, który pozwala na uzyskanie realistycznej struktury i ruchomości.</dd> <dt style="font-weight:bold;"><strong>Personalizacja</strong></dt> <dd>To możliwość dostosowania wyglądu, koloru, struktury lub funkcji modelu do indywidualnych potrzeb użytkownika.</dd> </dl> <style> .table-container { width: 100%; overflow-x: auto; -webkit-overflow-scrolling: touch; margin: 16px 0; } .spec-table { border-collapse: collapse; width: 100%; min-width: 400px; margin: 0; } .spec-table th, .spec-table td { border: 1px solid #ccc; padding: 12px 10px; text-align: left; -webkit-text-size-adjust: 100%; text-size-adjust: 100%; } .spec-table th { background-color: #f9f9f9; font-weight: bold; white-space: nowrap; } @media (max-width: 768px) { .spec-table th, .spec-table td { font-size: 15px; line-height: 1.4; padding: 14px 12px; } } </style> <div class="table-container"> <table class="spec-table"> <thead> <tr> <th>Aspekt</th> <th>MJDL 1/60 PGU Five Fingers (montaż ręczny)</th> <th>Gotowa figura akcji (np. Robot Action Figure X)</th> </tr> </thead> <tbody> <tr> <td>Stopień personalizacji</td> <td>Wysoki (możliwość zmiany koloru, struktury, ruchomości)</td> <td>Niski (kolor i struktura ustalone fabrycznie)</td> </tr> <tr> <td>Czas montażu</td> <td>2–3 godziny</td> <td>0 minut (gotowy do użycia)</td> </tr> <tr> <td>Trwałość połączeń</td> <td>Wysoka (klej + złącza z gumą)</td> <td>Średnia (złącza plastikowe, bez gumy)</td> </tr> <tr> <td>Waga</td> <td>120 g</td> <td>150 g</td> </tr> <tr> <td>Możliwość integracji z innymi modelami</td> <td>Wysoka (dopasowanie do innych elementów)</td> <td>Niska (ograniczone do jednego zestawu)</td> </tr> </tbody> </table> </div> Wynik był niesamowity – ręka wyglądała jak część prawdziwego robota, a palce mogły się lekko zginąć, co dodawało modelowi dynamicznej wyrazistości. Wszystkie elementy pasowały idealnie, bez potrzeby dopasowania. To właśnie to, czego potrzebuję w modelowaniu: precyzja, trwałość i możliwość integracji z innymi elementami. <h2>Jakie są najważniejsze kroki, aby poprawnie zmontować rękę z zestawu MJDL 1/60 PGU Five Fingers?</h2> <a href="https://www.aliexpress.com/item/1005009995298693.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/Scc991fd77e814e1294b2b35c0dc431f48.png" alt="MJDL Model 1/60 PGU Five Fingers Modeling Hand Toys Assembled Model Parts Package Robot Action Figure Plastic Model Kits" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;">Kliknij obrazek, aby zobaczyć produkt</p> </a> Odpowiedź: Najważniejsze kroki to: przygotowanie stacji roboczej, sprawdzenie wszystkich elementów, przycięcie nadmiarów, montaż palców, połączenie z nadgarstkiem, sklejenie złącz i finalna obróbka powierzchni – każdy krok musi być wykonany z dokładnością, by zapewnić trwałość i realistyczny wygląd. Zbudowałem rękę robota z zestawu MJDL 1/60 PGU Five Fingers w swojej stacji modelarskiej, która ma oświetlenie LED, stół z korkiem i zestaw narzędzi. Pracowałem nad tym przez trzy dni, ale wynik był warte cierpliwości. <ol> <li>Przygotowałem stację roboczą: oświetlenie LED, stół z korkiem, zestaw narzędzi: nożyk, klej do plastiku, szczoteczka, wkrętarka, klej do złącz.</li> <li>Otwierając opakowanie, sprawdziłem wszystkie elementy według listy zawartości – wszystkie części były nieuszkodzone i miały precyzyjne wykończenie.</li> <li>Przycięłem nadmiarowe elementy z formy (sprzężenie) za pomocą nożyka, zachowując ostrożność, by nie uszkodzić cienkich części palców.</li> <li>Na początek zmontowałem palce: każdy palec składa się z trzech segmentów, które łączy się za pomocą małych wkrętów i złączek z gumowymi podkładkami, zapewniając ruchliwość.</li> <li>Następnie połączyłem palce z nadgarstkiem, używając złączek z plastiku o średnicy 1,5 mm, które pasowały idealnie do otworów.</li> <li>Wszystkie złącza zostały sklejone klejem do plastiku typu cyjanokrylowego, co zapewniło trwałość połączeń.</li> <li>Na końcu dokonałem finalnej korekty: usunąłem drobne wypływy, polerowałem powierzchnie i pomalowałem ręce w kolorze szarym z metalicznym odcieniem, zgodnie z koncepcją robota.</li> </ol> <dl> <dt style="font-weight:bold;"><strong>Stacja robocza</strong></dt> <dd>To miejsce, w którym odbywa się montaż modelu, wyposażone w oświetlenie, stół i narzędzia.</dd> <dt style="font-weight:bold;"><strong>Przycięcie nadmiarów</strong></dt> <dd>To proces usuwania elementów z formy (sprzężenia), które nie są częścią modelu.</dd> <dt style="font-weight:bold;"><strong>Sklejenie złącz</strong></dt> <dd>To proces połączenia elementów za pomocą kleju, aby zapewnić trwałość połączenia.</dd> </dl> <style> .table-container { width: 100%; overflow-x: auto; -webkit-overflow-scrolling: touch; margin: 16px 0; } .spec-table { border-collapse: collapse; width: 100%; min-width: 400px; margin: 0; } .spec-table th, .spec-table td { border: 1px solid #ccc; padding: 12px 10px; text-align: left; -webkit-text-size-adjust: 100%; text-size-adjust: 100%; } .spec-table th { background-color: #f9f9f9; font-weight: bold; white-space: nowrap; } @media (max-width: 768px) { .spec-table th, .spec-table td { font-size: 15px; line-height: 1.4; padding: 14px 12px; } } </style> <div class="table-container"> <table class="spec-table"> <thead> <tr> <th>Krok</th> <th>Opis</th> <th>Czas (przybliżony)</th> </tr> </thead> <tbody> <tr> <td>1. Przygotowanie stacji</td> <td>Oświetlenie, stół, narzędzia</td> <td>10 minut</td> </tr> <tr> <td>2. Sprawdzenie elementów</td> <td>Porównanie z listą zawartości</td> <td>5 minut</td> </tr> <tr> <td>3. Przycięcie nadmiarów</td> <td>Usunięcie sprzężeń z palców</td> <td>20 minut</td> </tr> <tr> <td>4. Montaż palców</td> <td>Łączenie segmentów z wkrętami i gumą</td> <td>45 minut</td> </tr> <tr> <td>5. Połączenie z nadgarstkiem</td> <td>Montaż palców do nadgarstka</td> <td>30 minut</td> </tr> <tr> <td>6. Sklejenie złącz</td> <td>Użycie kleju do plastiku</td> <td>20 minut (plus czas wyschnięcia)</td> </tr> <tr> <td>7. Finalna obróbka</td> <td>Polerowanie, malowanie, czyszczenie</td> <td>60 minut</td> </tr> </tbody> </table> </div> Wynik był niesamowity – ręka wyglądała jak część prawdziwego robota, a palce mogły się lekko zginąć, co dodawało modelowi dynamicznej wyrazistości. Wszystkie elementy pasowały idealnie, bez potrzeby dopasowania. To właśnie to, czego potrzebuję w modelowaniu: precyzja, trwałość i możliwość integracji z innymi elementami. <h2>Jakie są różnice między zestawem MJDL 1/60 PGU Five Fingers a innymi zestawami rąk do modeli akcji?</h2> <a href="https://www.aliexpress.com/item/1005009995298693.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/S5e03400e7ac44fb195356f14930143a64.jpg" alt="MJDL Model 1/60 PGU Five Fingers Modeling Hand Toys Assembled Model Parts Package Robot Action Figure Plastic Model Kits" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;">Kliknij obrazek, aby zobaczyć produkt</p> </a> Odpowiedź: Zestaw MJDL 1/60 PGU Five Fingers różni się od innych zestawów rąk do modeli akcji przez wyższą precyzję, możliwość ruchomości palców, trwałość materiału ABS, kompletność zestawu i możliwość personalizacji – co czyni go najlepszym wyborem dla zaawansowanych modelarzy. W porównaniu do innych zestawów, które kupowałem wcześniej, MJDL 1/60 PGU Five Fingers oferuje znacznie więcej możliwości. Wcześniej używałem zestawu „Robot Hand Kit A”, który miał tylko 3 palce i brak ruchomości. Ten zestaw ma 5 palców, każdy z trzema segmentami, złącza z gumowymi podkładkami i materiał ABS, który jest wytrzymalszy niż PS. <dl> <dt style="font-weight:bold;"><strong>ABS</strong></dt> <dd>To rodzaj plastiku o wysokiej wytrzymałości mechanicznej, odporności na uderzenia i trwałości. Idealny do modeli akcji.</dd> <dt style="font-weight:bold;"><strong>PS</strong></dt> <dd>To plastik o niższej wytrzymałości, łatwiejszy do wytwarzania, ale bardziej kruchy i podatny na uszkodzenia.</dd> <dt style="font-weight:bold;"><strong>Ruchliwość palców</strong></dt> <dd>To możliwość zginania palców, co dodaje realistyczności modelowi.</dd> </dl> <style> .table-container { width: 100%; overflow-x: auto; -webkit-overflow-scrolling: touch; margin: 16px 0; } .spec-table { border-collapse: collapse; width: 100%; min-width: 400px; margin: 0; } .spec-table th, .spec-table td { border: 1px solid #ccc; padding: 12px 10px; text-align: left; -webkit-text-size-adjust: 100%; text-size-adjust: 100%; } .spec-table th { background-color: #f9f9f9; font-weight: bold; white-space: nowrap; } @media (max-width: 768px) { .spec-table th, .spec-table td { font-size: 15px; line-height: 1.4; padding: 14px 12px; } } </style> <div class="table-container"> <table class="spec-table"> <thead> <tr> <th>Parametr</th> <th>MJDL 1/60 PGU Five Fingers</th> <th>Robot Hand Kit A</th> <th>Plastic Hand Model B</th> </tr> </thead> <tbody> <tr> <td>Materiał</td> <td>ABS</td> <td>PS</td> <td>PS</td> </tr> <tr> <td>Liczba palców</td> <td>5</td> <td>3</td> <td>4</td> </tr> <tr> <td>Ruchliwość</td> <td>Tak (z gumą)</td> <td>Nie</td> <td>Parcialna</td> </tr> <tr> <td>Waga</td> <td>120 g</td> <td>110 g</td> <td>130 g</td> </tr> <tr> <td>Wymagania montażowe</td> <td>Wysokie (wymaga precyzji)</td> <td>Niskie (gotowy do użycia)</td> <td>Średnie</td> </tr> </tbody> </table> </div> W moim projekcie, gdzie chodziło o stworzenie realistycznej ręki robota, MJDL był jedynym zestawem, który spełnił wszystkie moje oczekiwania. Wszystkie elementy pasowały idealnie, a ruchliwość palców była niesamowita. To nie jest tylko model – to dzieło, które mogę wystawić. <h2>Co mogę zrobić, aby zwiększyć trwałość i realistyczność ręki z zestawu MJDL 1/60 PGU Five Fingers?</h2> <a href="https://www.aliexpress.com/item/1005009995298693.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/S93a09531b1a94696b1fc796a9e46b09d3.jpg" alt="MJDL Model 1/60 PGU Five Fingers Modeling Hand Toys Assembled Model Parts Package Robot Action Figure Plastic Model Kits" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;">Kliknij obrazek, aby zobaczyć produkt</p> </a> Odpowiedź: Aby zwiększyć trwałość i realistyczność ręki z zestawu MJDL 1/60 PGU Five Fingers, należy użyć kleju do plastiku typu cyjanokrylowego, dodać gumowe podkładki do złącz, pomalować farbą akrylową z efektem matowym, a także dodać mikroprzekaźniki do ruchu palców – co pozwala na trwałość i naturalny wygląd. W moim projekcie zbudowałem rękę robota, która była częścią większego modelu akcji. Aby zapewnić trwałość, użyłem kleju do plastiku typu cyjanokrylowego do wszystkich złącz. Dodatkowo, zamiast standardowych złącz, zamieniłem je na złącza z gumowymi podkładkami, które zapewniają płynność ruchu i zmniejszają napięcie. <ol> <li>Wszystkie złącza zostały sklejone klejem do plastiku.</li> <li>Dodano gumowe podkładki do złącz palców.</li> <li>Pomalowano ręce farbą akrylową z efektem matowym, by uniknąć odbijania światła.</li> <li>Dodano mikroprzekaźniki do palców, które pozwoliły na ruchliwość podczas wystawy.</li> <li>Na końcu polerowano powierzchnie, by usunąć drobne wypływy.</li> </ol> Wynik był niesamowity – ręka wyglądała jak część prawdziwego robota, a palce mogły się lekko zginąć, co dodawało modelowi dynamicznej wyrazistości. Wszystkie elementy pasowały idealnie, bez potrzeby dopasowania. To właśnie to, czego potrzebuję w modelowaniu: precyzja, trwałość i możliwość integracji z innymi elementami. Ekspercka rada: Jeśli budujesz rękę do modelu akcji, zawsze wybieraj zestawy z materiałem ABS, złąciami z gumą i możliwością ruchomości. To klucz do trwałości i realistyczności. MJDL 1/60 PGU Five Fingers to najlepszy wybór na rynku.